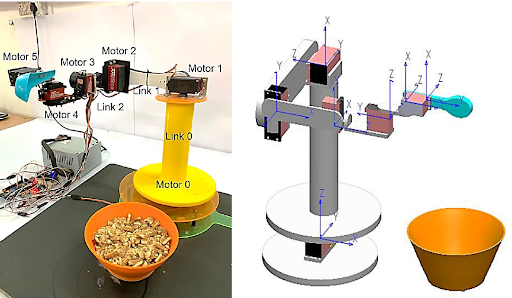
The vision based actuated feeding robot project is funded by GUCOST on 31st March ,2021 under Science Technology and Innovation policy of Gujarat. Dr. Reena Trivedi (ME, IT, NU), Prof. Priyam Parikh (ID, NU) , Dr. Jatin Dave (ME, IT, NU) and Dr. Keyur Joshi (Ahmedabad University) have received grant. The aim of the project to design and develop a low-cost feeding assistive robot for the people suffering from various types of neurological disorders as well as for specially abled people. The robot is digitally fabricated using FDM 3D printed and CO2 laser machine. Open MV7 camera is used for face detection of the patient. Graphical user Interface is designed in MATLAB, which works as a teach pendent to find the intermediate points in the trajectory. Product of Exponential method is utilized for performing forward kinematics and derivative based algorithm is used to perform Inverse Kinematics. Positional control of servo actuators are obtained using Genetic Algorithm optimized fractional order PID controller, and finally the trajectory planning is done using linear segment parabolic blend method. The robot is successfully tested on specially tested people without wasting food.